
5670
博世公司车道标记数据集
llamas
博世
自动驾驶
车道识别
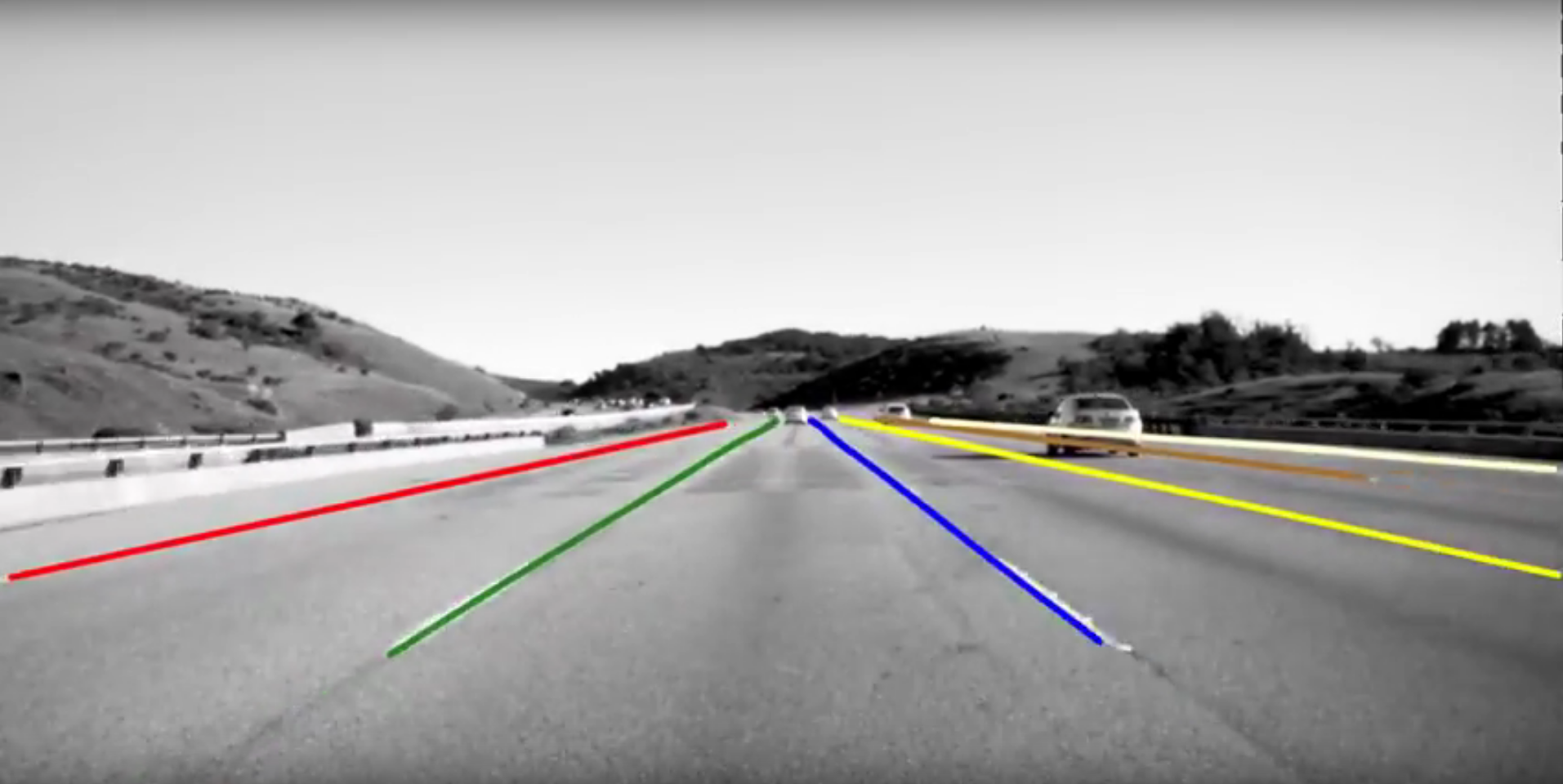
使用激光雷达贴图自动添加注释的车道标记。
免积分下载
数据集市
2020年12月31日
相关数据

交通信号识别视频数据(Traffic Lights Recognition (TLR))
Traffic Lights Recognition (TL... 免积分下载
Elektra自动驾驶数据集
Elektra 是一个自动驾驶汽车项目,由 CVC 研究中心... 免积分下载
戴姆勒行人检测标准数据库
该数据库采用车载摄像机获取,分为检测和分类两个数据集。 免积分下载数据介绍
- Over 100,000 annotated images
- Annotations of over 100 meters
- Resolution of 1276 x 717 pixels

A SEGMENTATION CHALLENGE
Lane markers are tricky to annotate because of their median width of only 12 cm. At farther distances, the number of pixels gets very sparse and the markers start to blend with the asphalt in the camera image.
LANE APPROXIMATIONS
While pixel-level segmentation can be very useful for localization, some automated driving systems benefit from higher level representations such as splines, clothoids, or polynomials. This section of the dataset allows for evaluating existing and novel techniques.
CITATION
@inproceedings{llamas2019, title={Unsupervised Labeled Lane Marker Dataset Generation Using Maps},
author={Behrendt, Karsten and Soussan, Ryan},
booktitle={Proceedings of the IEEE International Conference on Computer Vision},
year={2019}
}
还没有任何文件记录.