Waymo无人驾驶高分辨率传感器数据集
Waymo open dataset
高分辨率激光雷达和摄像机数据由自动驾驶汽车在各种情况下收集。
相关数据

交通信号识别视频数据(Traffic Lights Recognition (TLR))
Traffic Lights Recognition (TL... 免积分下载
Elektra自动驾驶数据集
Elektra 是一个自动驾驶汽车项目,由 CVC 研究中心... 免积分下载
戴姆勒行人检测标准数据库
该数据库采用车载摄像机获取,分为检测和分类两个数据集。 免积分下载数据介绍
Waymo 开放数据集由 Waymo 自动驾驶汽车在各种条件下收集的高分辨率传感器数据组成,它与 KITTI、NuScenes 等数据集的对比数据如下,在传感器配置、数据集大小上都有很大的提升。
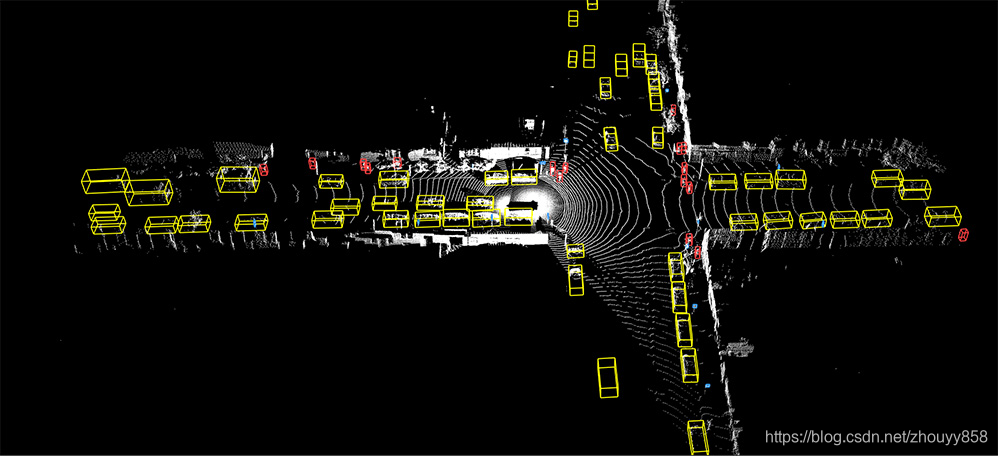
Waymo 数据集的传感器包含 5 个激光雷达、5 个摄像头,激光雷达和摄像头的同步效果也更好。
更重要的是,Waymo 数据集包含 3000 段驾驶记录,时长共 16.7 小时,平均每段长度约为 20 秒。整个数据集一共包含 60 万帧,共有大约 2500 万 3D 边界框、2200 万 2D 边界框。
此外,在数据集多样性上,Waymo Open Dataset 也有很大的提升,该数据集涵盖不同的天气条件,白天、夜晚不同的时间段,市中心、郊区不同地点,行人、自行车等不同道路对象,等等。
数据集特点:
1. 规模和覆盖范围:
数据集包含3000个驾驶片段,每一片段包含20秒的连续驾驶画面。连续镜头内容可以使得研究人员开发模型来跟踪和预测其他道路使用者的行为。
2. 多样化的驾驶环境:
数据采集的范围涵盖凤凰城、柯克兰、山景城、旧金山等地区,以及各种驾驶条件下的数据,包括白天、黑夜、黎明、黄昏、雨天和晴天。
3. 高分别率的特点和360度的视图:
每个分段涵盖5个高分辨率Waymo激光雷达和五个前置和侧面摄像头的数据。
4. 密集的标签信息:
车辆、行人、自行车、标识牌等图像都经过精心标记,一共打了2500万个3D标签和2200万个2D标签。
5. 是相机-激光雷达同步:
Waymo称,该团队致力于融合了多个摄像头和激光雷达数据的3D感知模型。Waymo设计了全套的自动驾驶系统,包含硬件和软件,用以无缝地协同工作,其中包括选择传感器的位置和高质量的时间同步。
数据使用引用:
@misc{sun2019scalability,
title={Scalability in Perception for Autonomous Driving: Waymo Open Dataset},
author={Pei Sun and Henrik Kretzschmar and Xerxes Dotiwalla and Aurelien Chouard and Vijaysai Patnaik and Paul Tsui and James Guo and Yin Zhou and Yuning Chai and Benjamin Caine and Vijay Vasudevan and Wei Han and Jiquan Ngiam and Hang Zhao and Aleksei Timofeev and Scott Ettinger and Maxim Krivokon and Amy Gao and Aditya Joshi and Yu Zhang and Jonathon Shlens and Zhifeng Chen and Dragomir Anguelov},
year={2019},
eprint={1912.04838},
archivePrefix={arXiv},
primaryClass={cs.CV}
}
数据规格
| 发布时间 | 2019年 |