5507
失物招领数据集
LostandFound
失物招领
自动驾驶
失物招领数据集解决了自主驾驶应用中发现意外的小型道路危险(通常由货物丢失造成的)的问题。
免积分下载
数据集市
2020年09月28日
10.79GB
相关数据

Caltech-256 数据集
Caltech-256 是一个图像物体识别数据集,包含 30... 免积分下载
猫的图片数据集
超过9,000张带有面部标注特征的猫的图像数据集 免积分下载
CACD 跨年龄人脸识别和检索数据集
CACD 数据集是一个用于跨年龄的人脸识别和检索的大规模数据... 免积分下载数据介绍
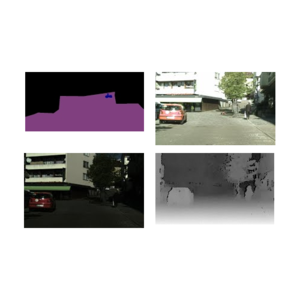
LostandFound 数据集解决了检测路上通常由货物丢失造成的意外小障碍物的问题。
该数据集包括 112 个立体声视频序列,具有 2104 个带注释帧(从记录的数据中大约每十分之一帧选取一帧)。
论文引用:
Peter Pinggera, Sebastian Ramos, Stefan Gehrig, Uwe Franke, Carsten Rother, Rudolf Mester, "Lost and Found: Detecting Small Road Hazards for Self-Driving Vehicles", Proceedings of IROS 2016, Daejeon, Korea. Link to the paper
数据使用许可协议:

|
gtCoarse.zip (37MB) annotations for train and test sets (2104 annotated images) |

|
leftImg8bit.zip(6GB) left 8-bit images - train and test set rightImg8bit.zip (6GB) right 8-bit images - train and test set |

|
leftImg16bit.zipl (17GB) right 16-bit images - train and test set (2104 images) rightImg16bit.zip (17GB) right 16-bit images - train and test set (2104 images) |

|
disparity.zip (1.4GB) depth maps using Semi-Global Matching for
train and test set (2104 images) |
|
timestamp.tgz (50kB) timestamps for train and test sets camera.zip (1MB) Intrinsic and extrinsic camera parameters for train and test sets vehicle.zip (1MB) vehicle odometry data (speed and yaw rate) for train and test sets |
还没有任何文件记录.