
4203
iCubWorld 图像分类数据
iCubWorld
iCubWorld
图像
机器人
iCub
计算机视觉
机器认知
自动化
机器人训练
图片数据集
物体检测
物体识别
图像识别
图像分析
通过在观察日常物体的同时从iCub人形机器人的摄像机记录下来而获得的图像集合。
免积分下载
数据集市
2020年04月17日
相关数据

Caltech-256 数据集
Caltech-256 是一个图像物体识别数据集,包含 30... 免积分下载
猫的图片数据集
超过9,000张带有面部标注特征的猫的图像数据集 免积分下载
CACD 跨年龄人脸识别和检索数据集
CACD 数据集是一个用于跨年龄的人脸识别和检索的大规模数据... 免积分下载数据介绍
iCubWorld数据集是图像的集合,记录了iCub在典型环境,实验室或办公室中观察物体时的视觉体验。采集设置被设计为允许自然的人机交互,其中老师通过用手口头提供感兴趣对象的标签并将其显示给机器人;iCub既可以在教师移动物体时跟踪物体,也可以将其握在手中。
自2013年以来,我们发布了四个不断增加的iCubWorld版本,旨在调查机器人视觉识别的互补方面。这些图像集可以在不同条件下进行训练时对识别系统的行为进行广泛的分析,从而为我们可以从真实系统中获得的性能提供可靠且可重现的基准。
数据采集 iCubWorld数据集中的图像带有表示的对象的标签及其周围的边界框。我们开发了一个人机交互应用程序,以通过利用现实环境以及与机器人的交互来获取带注释的图像。此设置允许以快速自然的方式构建大型带注释的数据集。
唯一的外部监督是以人类老师的形式进行的,其口头提供了将要获取的物体的标签。老师靠近机器人,并用手展示物体。在采集过程中,通过展开自检技术来实现对象在机器人视野中的定位。
两种获取方式是可能的:人工或机器人方式。
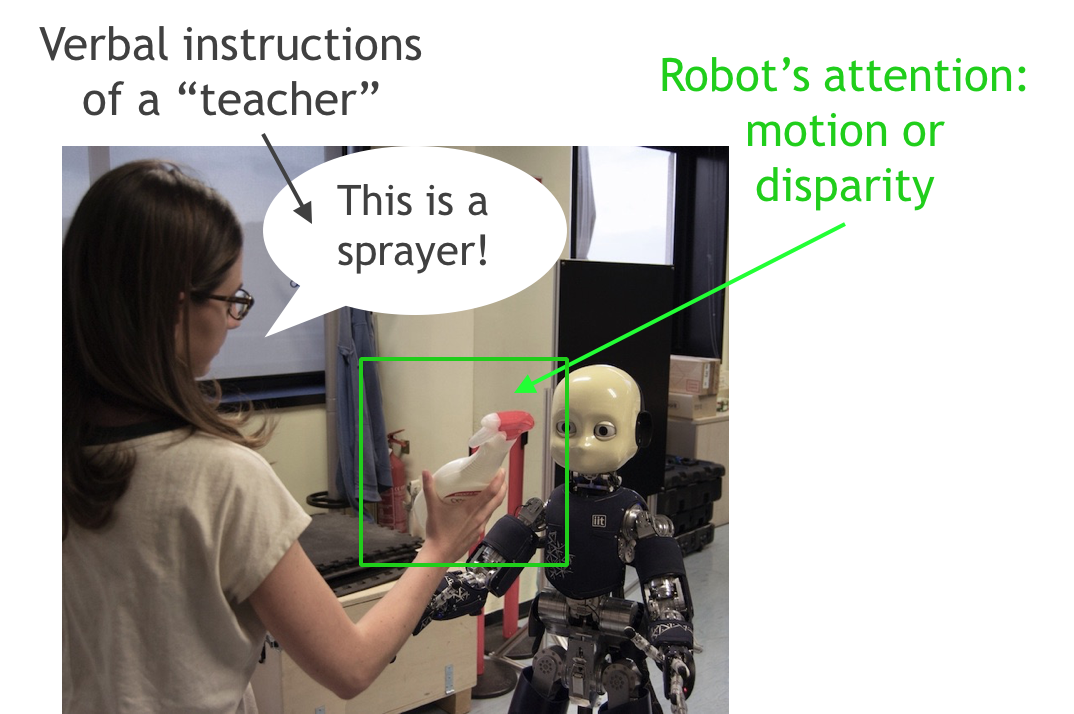
在人类模式下的一次获取会话中拍摄的照片:教师在提供语音注释的同时向机器人展示了一个对象。
数据内容
![]()
200个对象分为20类 每个物体10次采集(〜3600张图像) 每个对象都是在进行孤立的视觉转换的同时获取的,目的是研究现实世界中的烦扰。
数据下载 iCubWorld官网提供数据免费下载
认识iCub

iCub是类人机器人,由RobotCub项目开发。它是一个53自由度的机器人,大约1m高,并配备了视觉,前庭,听觉,触觉,本体感觉和扭矩传感器。
还没有任何文件记录.